处理机调度
在多道程序系统中,调度的实质是一种资源分配,而处理机调度是对处理机资源的分配。
处理机调度的层次
在多道批处理系统中,一个作业从提交、执行到完成,需要经历多级处理机调度。
- 高级调度:即作业调度,根据算法决定将处于外存后备队列中的作业调入内存,并为它们创建进程,放入就绪队列。高级调度主要用于多道批处理系统,在实时和分时系统中不设置高级调度。
- 低级调度:即进程调度,决定就绪队列中哪个进程获得处理机,是最基本的一种调度。
- 中级调度:即内存调度,即存储器管理中的对换功能,在内存和外存间调换进程(即挂起和激活),以提高内存利用率和系统吞吐量。
处理机调度算法的目标
处理机调度算法的共同目标
- 资源利用率:最重要的是处理机利用率
- 公平性:使不同重要程度和紧急程度的进程获得相应的合理 的CPU 时间
- 平衡性:平衡不同种类进程的 CPU 占用时间
- 策略强制执行:对所制定的策略(包括安全策略)必须准确执行
批处理系统目标
- 平均周转时间短:周转时间包括作业在外存后备队列上等待调度的时间、进程在就绪队列等待调度的时间、进程在 CPU 上执行的时间和进程等待 I/O 操作完成的时间,可用加权平均周转时间(权重为系统为作业提供服务时间的倒数)衡量调度性能。
- 系统吞吐量高:即单位时间系统所完成的作业数
- 处理机利用率
分时系统目标
- 响应时间快:响应时间指请求信息输入到终端显示结果的时间
- 均衡性:系统响应时间与用户请求服务的复杂程度相适应
实时系统目标
- 截止时间的保证:截止时间指某任务开始的最迟时间或完成的最迟时间,对 HRT 任务要求必须保证截止时间要求,对 SRT 任务要求基本保证截止时间要求
- 可预测性:提前预测用户请求
1. 作业调度
1.1. 作业
作业是用户提交给系统一项相对独立的工作,包括程序、数据和一份作业说明书。在批处理系统中,是以作业为基本单位从外存调入内存的。作业又分为若干个相对独立又相互关联的顺序加工步骤,即作业步。
作业控制块
在多道批处理系统中,每个作业都设置有一个作业控制块 JCB(Job Control Block),它是作业在系统中存在的标志,包含作业标识、用户名称、用户账号、作业类型(CPU 繁忙型、I/O 繁忙型、批量型、终端型)、作业状态、调度信息(优先级、作业运行时间)、资源需求(预计运行时间、需要内存大小等)、资源使用情况等。
作业运行的三阶段和三状态
作业从进入系统到运行结束,通常经历收容、运行和完成三个阶段,对应的状态分别是后备状态、运行状态和完成状态。
- 收容阶段:用户提交的作业通过某种输入方式或 SPOOLing 系统被输入到硬盘上,再为作业建立 JCB 并放入后备队列
- 运行阶段:作业被调度后,系统为其建立进程并放入就绪队列,直到运行结束
- 完成阶段:作业运行完成或发生异常提前结束时,作业的作业控制块和所有资源被收回,并将运行结果信息形成输出文件后输出
1.2. 作业调度
作业调度的任务是确定接纳的作业数目和具体作业。作业接纳多了,容易引起进程因运行内存不足而发生中断并急剧增加。常见的作业调度算法有:
- FCFS:先来先服务调度算法(first-come first-served),一般结合其他算法使用
- SJF:短作业优先调度算法(short job first),基于实际中短作业占很大比例
- PSA:优先级调度算法(priority-scheduling algorithm),基于作业的紧迫程度
- HRRN:高响应比优先调度算法(Hightest Response Ratio Next),响应比=响应时间/要求服务时间
2. 进程调度
2.1. 进程调度
进程调度的主要任务是
- 保存处理机的现场信息
- 按某种算法选取进程
- 把处理机分配给进程
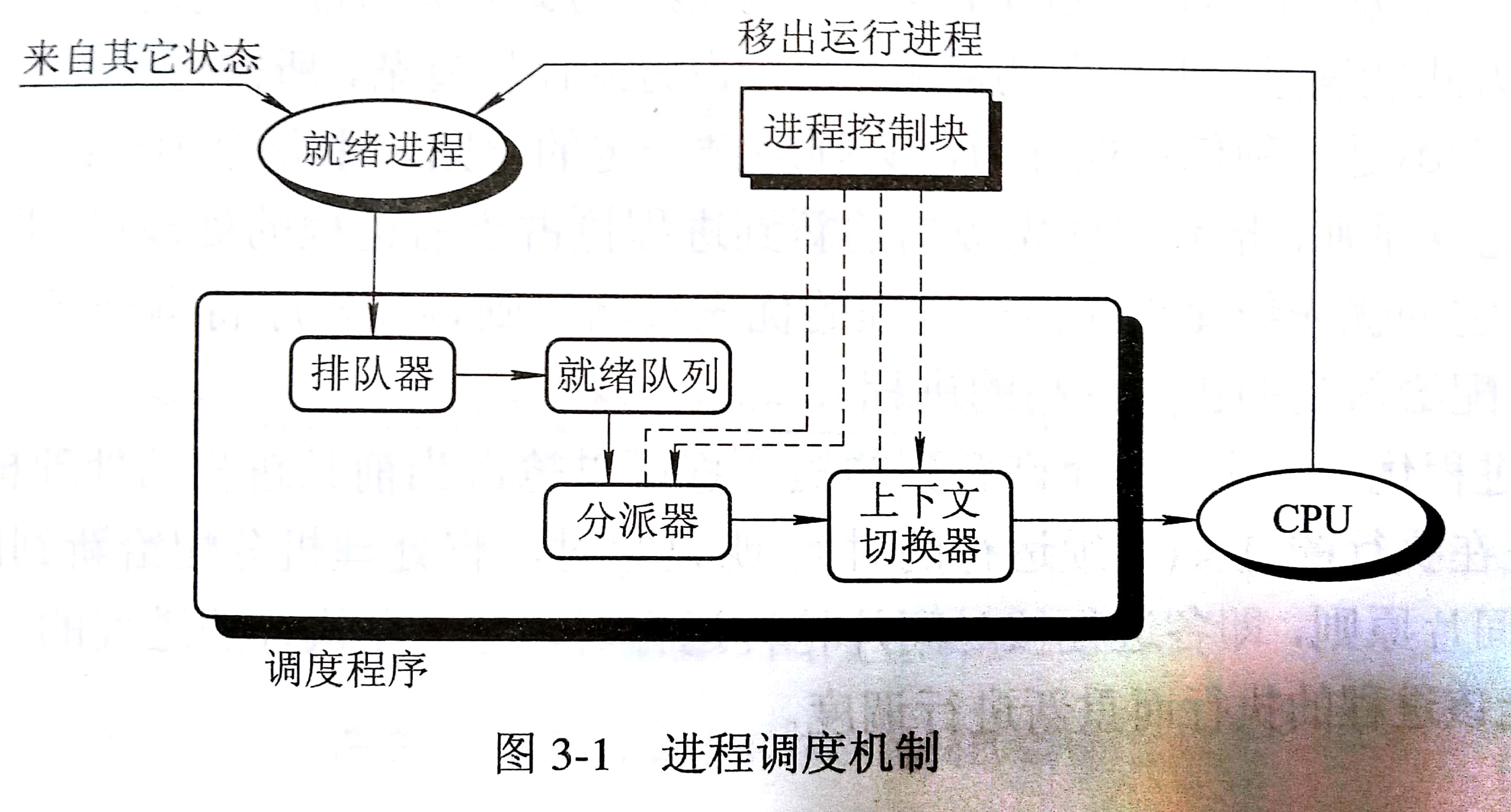
进程调度机制
- 排队器:将所有就绪进程按照一定的策略事先排成一个或多个队列
- 分派器:从就绪队列取出选定的进程,并进行从分派器到新选出进程间的上下文切换,将处理机分配给新选出的进程
- 上下文切换器:两次上下文切换操作
- 当前进程与分派程序的上下文切换:保存当前进程的处理机寄存器内容到 其PCB,并装入分派程序的上下文
- 分派程序与新进程的上下文切换:移除分派程序的上下文,将新进程的 CPU 现场信息装入处理机各寄存器
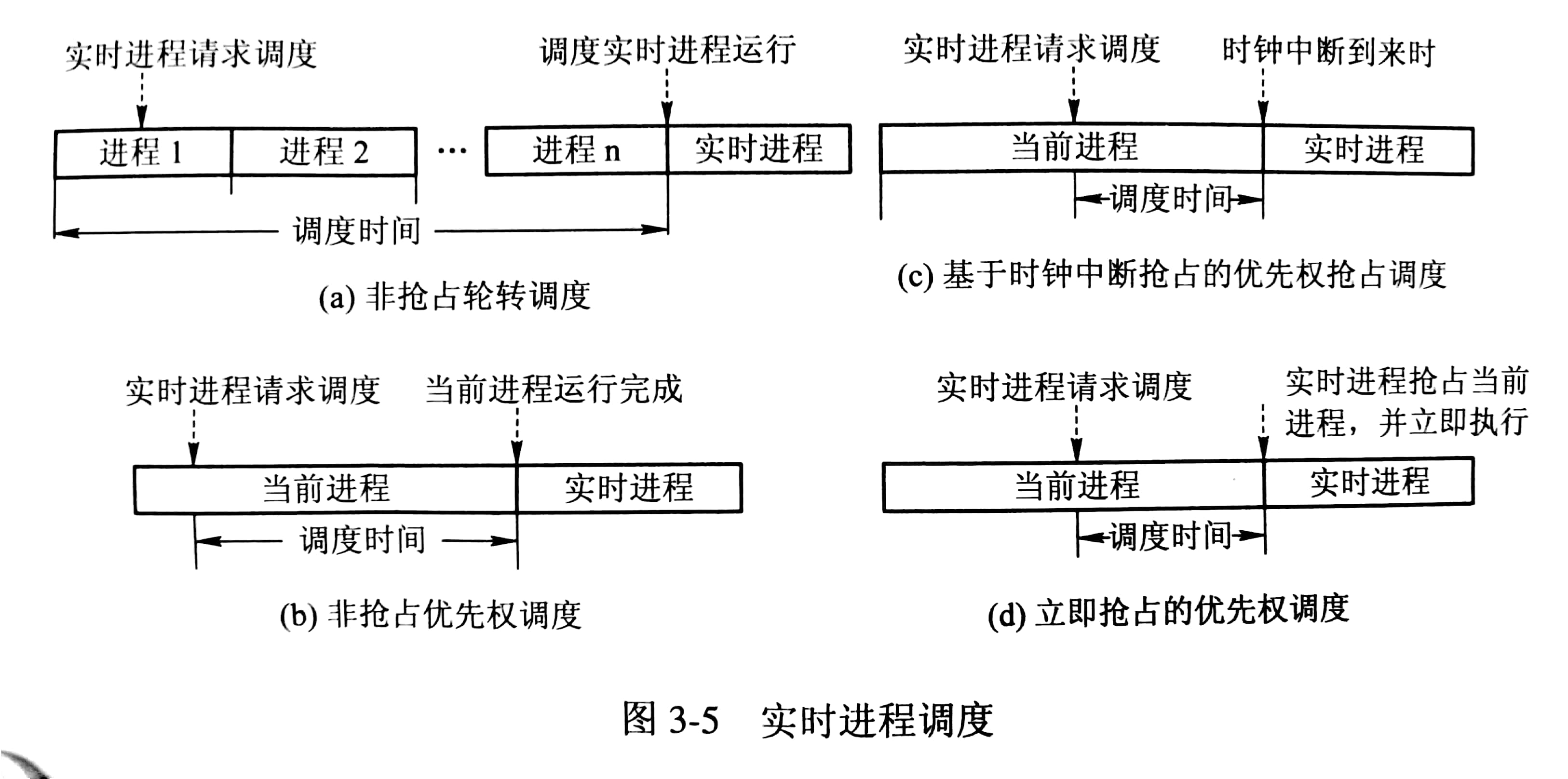
进程调度方式
- 非抢占方式(Nonpreemptive Mode):一旦将处理机分配给某进程,进程将会一直运行下去,直到
- 进程运行完毕或因发生某事件而异常结束
- 提出 I/O 请求而自行阻塞
- 在通信或同步过程中执行的某种原语操作
- 抢占方式(Preemptive Mode):根据一定原则(优先权原则、短进程优先原则、时间片原则)去暂停正在执行的进程,将处理机重新分配给另一进程
2.2. 进程调度算法
轮转 RR(round robin)调度算法
让就绪队列上的每个进程每次运行一个时间片(进程提前运行完毕,则提前调度进程),时间片时长一般选择略大于一次典型交互所需时间。
优先级调度算法
按进程调度方式分为非抢占和抢占两种,按优先级类型可分为静态优先级和动态优先级。
静态优先级是在创建进程时按照进程类型(系统进程高于一般用户进程)、进程对资源的需求(资源需求小的优先级高)和用户要求(进程的紧迫程度)确定,用一定范围的整数表示,并保持不变;动态优先级在进程创建时赋一初始值,随时间推进而改变。
多队列调度算法
不同就绪队列可采用不同的调度算法,就绪队列本身也可设置优先级。
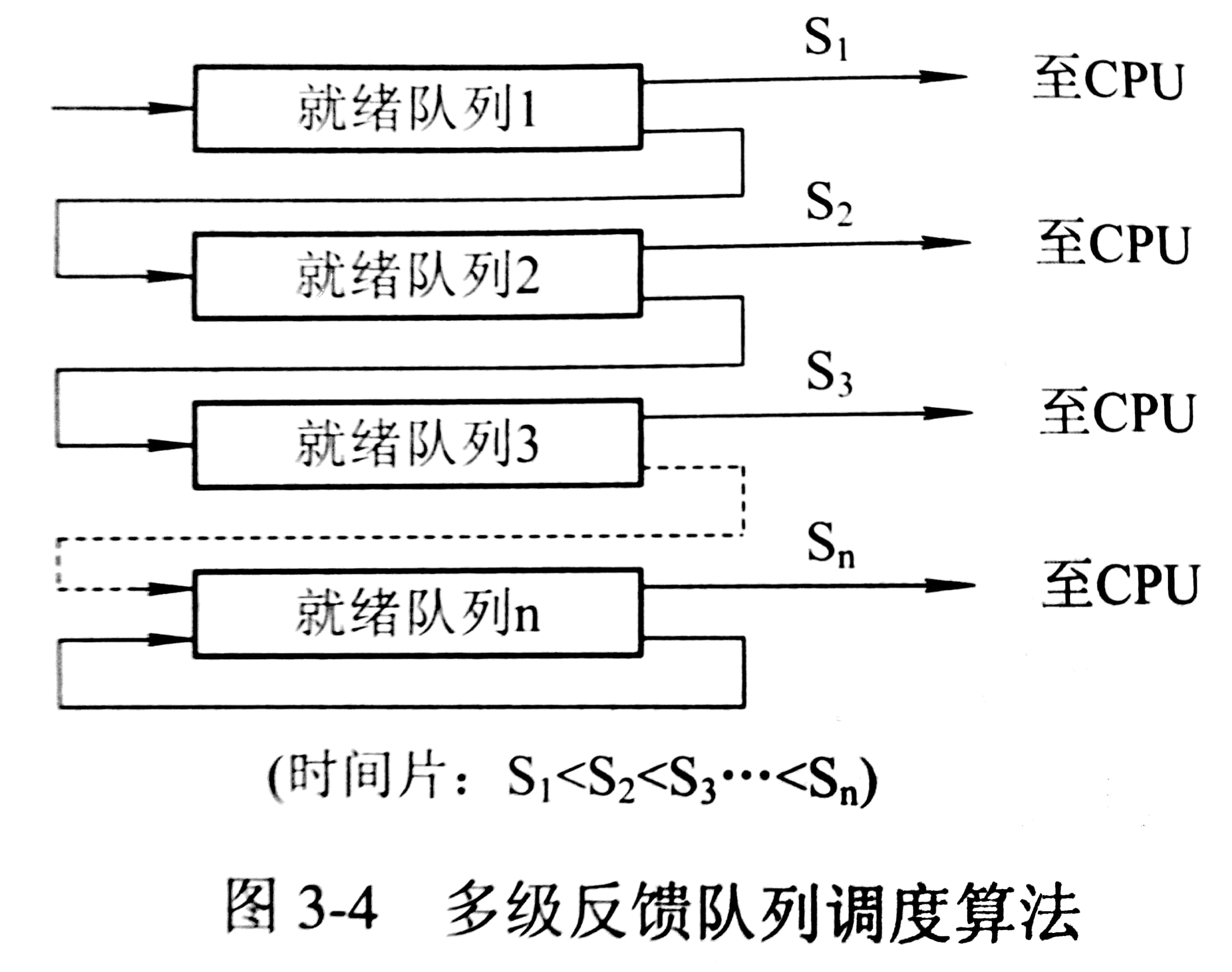
多级反馈队列(multileved feedback queuq)调度算法
不必事先知道各进程所需的执行时间,是目前公认较好的进程调度算法。
- 设置 N 个就绪队列,优先级一次降低,时间片长度逐个增加一倍,每个队列采用 FCFS 算法。
- 当新进程进入内存后,先将其放至第一个就绪队列末尾,轮到该进程执行时,若进程在时间片内完成,则撤离系统,否则放入下一个就绪队列末尾;第 N 个队列采用 RR 调度方式。
- 按队列优先级调度:当第1~(i-1) 就绪队列均为空时,系统才会调度第 i 队列;当优先级更高的队列有新进程时,把当前执行的进程放入其所在队列末尾,立即去调用优先级更高的进程。
基于公平原则的调度算法
- 保证调度算法:若系统中有 N 个相同类型的进程同时运行,必须保证每个进程都获得相同的处理机时间 1/N,实现方式是
- 跟踪计算每个进程自创建以来已执行的处理时间
- 计算每个进程应获得的处理机时间,即进程创建以来的时间除以 N
- 计算进程实际执行的处理时间和应获得的处理机时间的比率
- 比较该比率,比率小的优先调用,直到其比率不再最小
- 公平分享调度算法:若考虑各作业、各用户的公平,则需要统计其各自的进程数,为其赋予相应的比率倍数。
3. 实时调度
实时调度的基本条件
- 提供必要的信息:包括就绪时间、开始截止时间(和完成截止时间)、处理时间、资源要求、优先级
- 系统处理能力强:若系统中有 m 个周期性的 HRT,它们的处理时间表示为 Ci,周期时间表示为 Pi,处理机数为 N,则必须满足
- 采用抢占式调度机制
- 快速切换机制:中断的快速响应能力(要求有硬件中断机构,且禁止中断的时间间隔尽量短)和快速的任务分派能力(应使系统中的每个运行功能单位适当的小)
实时调度算法分类
3.1. 实时调度算法
最早截止时间优先EDF(Earliest Deadline First)算法
有非抢占式和抢占式两种
最低松弛度优先 LLF(Least Laxity First)算法
紧急(松弛)程度 = 任务必须完成时间 - 任务本身运行所需时间 - 当前时间,系统按照松弛度的大小来抢占调度进程。
3.2. 优先级倒置
即高优先级进程(线程)被低优先级进程(线程)延迟或阻塞的现象。
例如:
- P1、P2、P3 的优先级逐个降低,P1 和 P3 通过共享的一个临界资源进行交互,若 P3 先执行,并执行了 P(mutex) 操作;
- 此时 P2 就绪,P2 抢占 P3 的处理机而运行;
- 此时 P1 就绪,P1 抢占 P2 的处理机而运行,P1 运行至 P(mutex) 阻塞;
- 此时 P2 继续运行至结束,然后由 P3 接着运行至退出临界区,这时才轮到 P1 运行
解决方法是建立动态优先级继承:当一个优先级较高的进程要进入临界区,若一个优先级较低的进程正在使用相同的临界资源,则让后者继承前者的优先级直至退出临界区。
4. ChangeLog
2018.08.22 初稿